关于 SLAM
Simultaneous Localization and Mapping (SLAM) 即时定位与地图构建 是在未知环境中构建或更新地图,并同时利用地图信息跟踪定位的计算问题。虽然在最初看来像极了先有鸡还是先有蛋的问题,但对于某些环境下,至少在可控制的时间内,有几种算法可以近似地解决这个问题。目前为止的近似求解方法有 粒子滤波、扩展卡尔曼滤波 和 GraphSLAM 。随着人工智能的发展,也出现了 语义 SLAM (Semantic slam) 等新的求解方式,但就目前最为流行和广泛使用的还是 GraphSLAM 。
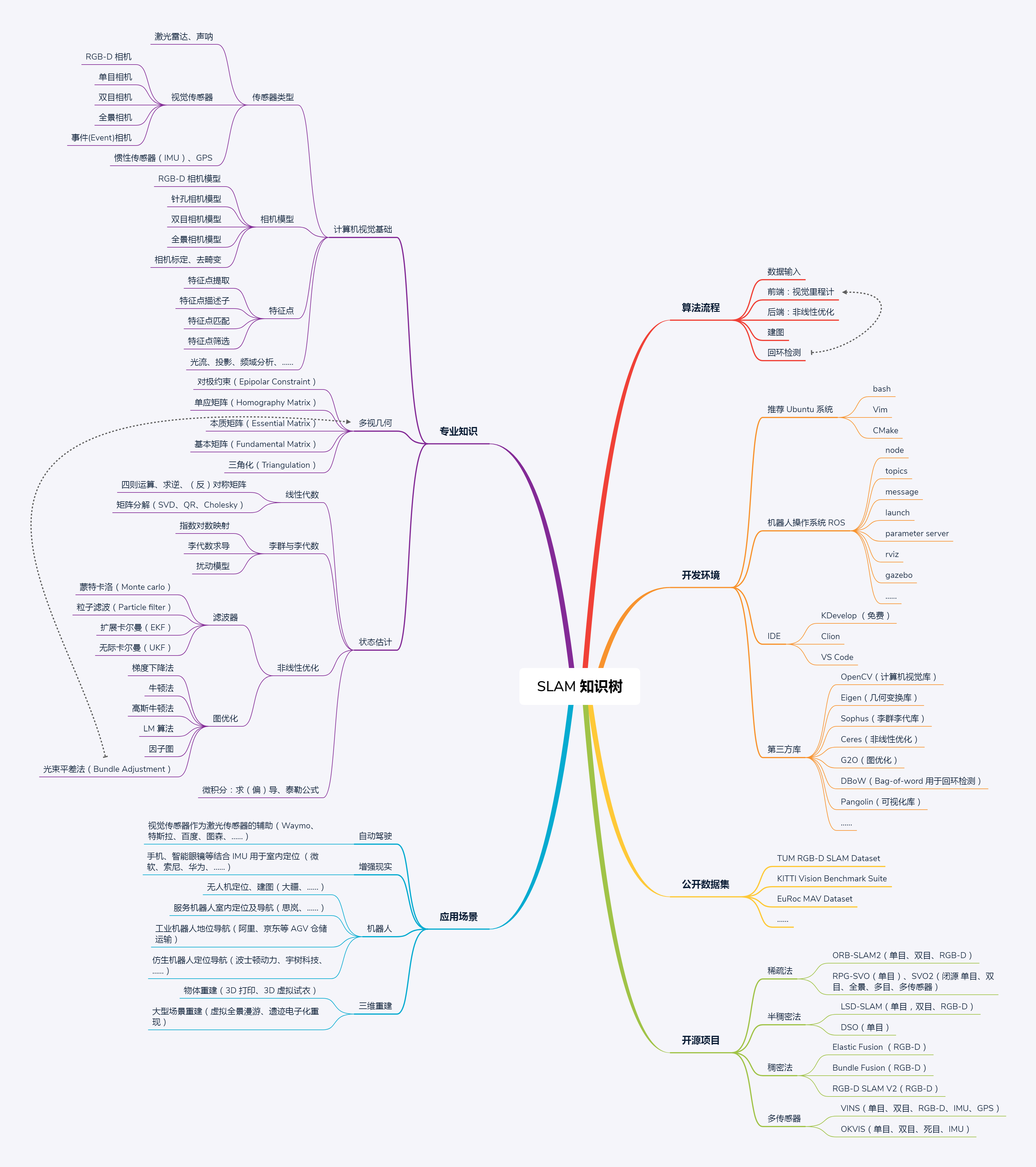
近年来,「SLAM 技术」成为了越来越多学者研究的课题方向,随着该技术的成熟,它也被广泛的应用于市场上的诸多产品上,例如:自动驾驶汽车、无人驾驶飞行器、自动水下航行器、行星漫游者、较新的家用机器人,等等。因而市场对「SLAM 算法工程师」的需求也越来越多。然而 「SLAM 技术」涉及知识体系之广、而且大部分知识也相对较难,所以 「SLAM 技术」并非那么容易能够掌握精通。下面给出大体的「SLAM 知识树 」(PNG图片下载、xmind文件下载 )
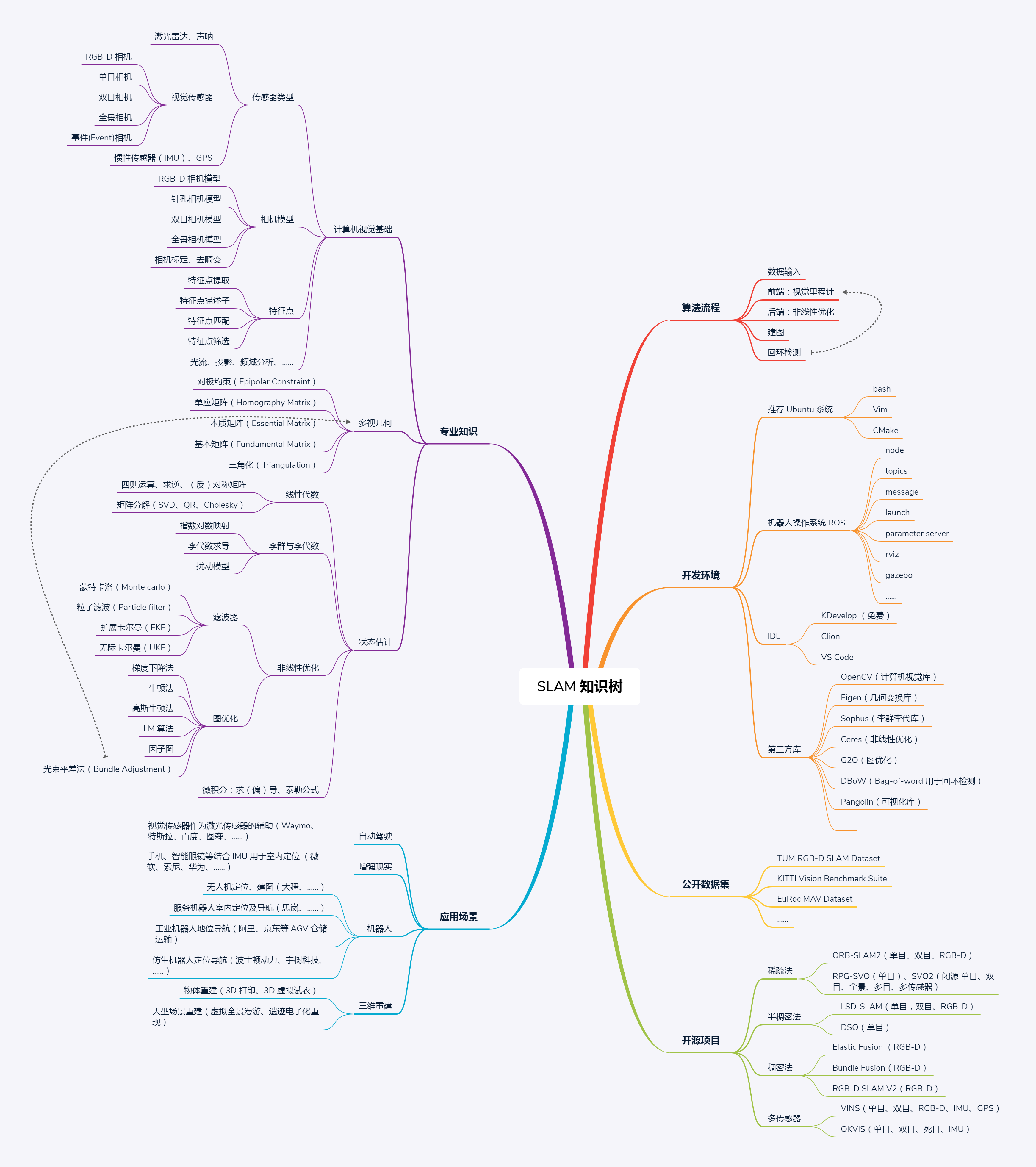{kind=link}
如果你喜欢该技术领域,想要在这个方向上有所发展,那么你就需要付出许多时间在这些知识中深挖。建议您可以考取相关领域的硕士及以上学历,这对你在市场竞争中能获取相当大的优势。当然这并非硬性规定,只要您对该技术感兴趣,并沉浸于研究之中,相信自己也可以成为该领域中优秀的人才之一。
「双非渣本的我」在创建这个站点的最初目的就是用于记录和分享自己学习「SLAM 技术」的经过。正所谓好记性不如烂笔头,之前书面记录的学习笔记随着时间的推移,很不方便查阅并且易于丢失,CSDN、博创园等博客不太简美或整体化,并且可能不支持一些数学公式、强调格式等,抑或是存在各种碍眼广告。因而选着了这种形式来记录和分享这个学习过程。
如果您对这个项目感兴趣,欢迎您 或者 该项目,或者持续关注该网址。如果您愿意分享您的学习过程到该网址,您可以阅读该项目的 README.md 来共同编写该站点。
下面分享一些个人认为值得关注的公众号及网址:
- 「泡泡机器人 SLAM 」公众号
- SlamCN
- OpenSLAM
- 学习SLAM需要哪些预备知识?(知乎)
- SLAM 学习视频合集(知乎)